本章介绍IFR规则下的飞行阶段。
航线飞行的示例
下面是一次常规的航线飞行的示例:
| 飞行阶段 | 主要内容 |
|---|---|
| 简报 | 机组协作简报、飞行计划回顾、气象与通告、特情预案 |
| 航前准备 | 飞行计划输入、绕机检查、驾驶舱准备 |
| (推出)开车 | 向管制员申请推出开车许可或(自滑机位)开车许可 |
| 离场滑行 | 向管制员申请地面滑行路线并遵守指令 |
| 起飞 | 申请起飞许可、起飞决断、抬轮与初始爬升 |
| 离场 | 遵循离场程序与管制员指令 |
| 航线飞行 | 巡航、监控、执行管制员指令、下降准备 |
| 进场 | 严格遵循进场程序并执行管制员指令 |
| 进近 | 建立稳定进近 |
| (终止进近/复飞) | 决断、执行复飞程序、联系管制 |
| 着陆 | 接地、减速 |
| 进场滑行 | 脱离跑道、滑行入位、关车 |
| 航后 | 完成飞行记录、回顾飞行 |
飞行阶段
以下是国际民航组织(ICAO)定义的各个飞行阶段。
航前 / Pre-Flight / PRF
飞机在地面的准备阶段。飞机静止,引擎运行或停车。
后推开车 / Pushback and Start up
飞机在地面移动,由拖车牵引,引擎运行或停车。
如果飞机依靠自身动力在地面移动,视为“滑行”阶段。
滑行 / Taxi
在起飞前或着陆后,飞机依靠自身动力在地面移动。包括四个子阶段:
动力后推 / Power back
从驻机位置依靠自身动力向后移动。
滑行到跑道 / Taxi to runway
从驻机位置滑行到跑道入口。
上跑道 / Line up
进入跑道,到达起飞位置。
脱离 / Vacate
脱离落地的跑道,到达驻机位置。
起飞 / Take-off
使用起飞推力,滑跑、抬轮、爬升到跑道净高35英尺的过程。
中断起飞 / Rejected Take-off / RTO
决定放弃起飞到开始在跑道上滑行的过程。
在指示空速(IAS)到达v1前,随时可以中断起飞。
初始爬升 / Initial Climb / INIT CLB
从跑道净高35英尺爬升到跑道净高1000英尺,或者引擎开始减推力。
航线飞行 / En Route
从初始爬升结束开始,直到飞机下降到最终进近点IAF。包含五个子阶段:
离场 / Departure / DEP
从起飞后直到离开起飞机场的机场管制地带。
巡航 / Cruise / CRZ
到达初始巡航高度后,开始下降前的所有平飞阶段。
高度层改变 / Change of cruise level / FLCH
到达初始巡航高度层后,在需要时改变巡航高度层的过程。
下降 / Descend / DES
从巡航高度层下降到最终进近点的过程。
进场 / Arrival / ARR
进入目的地机场的机场管制地带直到加入进近程序。
进近 / Approach / APPR
从初始进近点到开始着陆拉平的过程。包含四个子阶段:
初始进近 / Initial Approach
从IAF(初始进近定位点)到IF(中间进近定位点)。
中间进近 / Intermediate Approach
从IF(中间进近定位点)到FAF(最终进近点)。
最终进近 / Final Approach
从FAF(最终进近定位点)到开始着陆拉平。
终止进近/复飞 / Missed Approach/Go Around
从施加复飞推力开始,直到飞机重新恢复到进场/进近飞行状态。 在进近和着陆的整个阶段,都可以随时复飞。哪里不对劲?复飞就对了!
着陆 / Landing
从开始着陆拉平直到脱离跑道,或者直到施加了起飞推力、触地后复飞。包括三个子阶段:
拉平 / Flare
着陆前抬起机头直到触地的过程。
着陆滑跑 / Landing Roll
触地后,直到飞机脱离跑道。
落地连续 / Touch and Go
触地后重新升空的过程。
航后 / Post Flight / POF
飞机完成了航线飞行,飞机静止,引擎运行或停车。
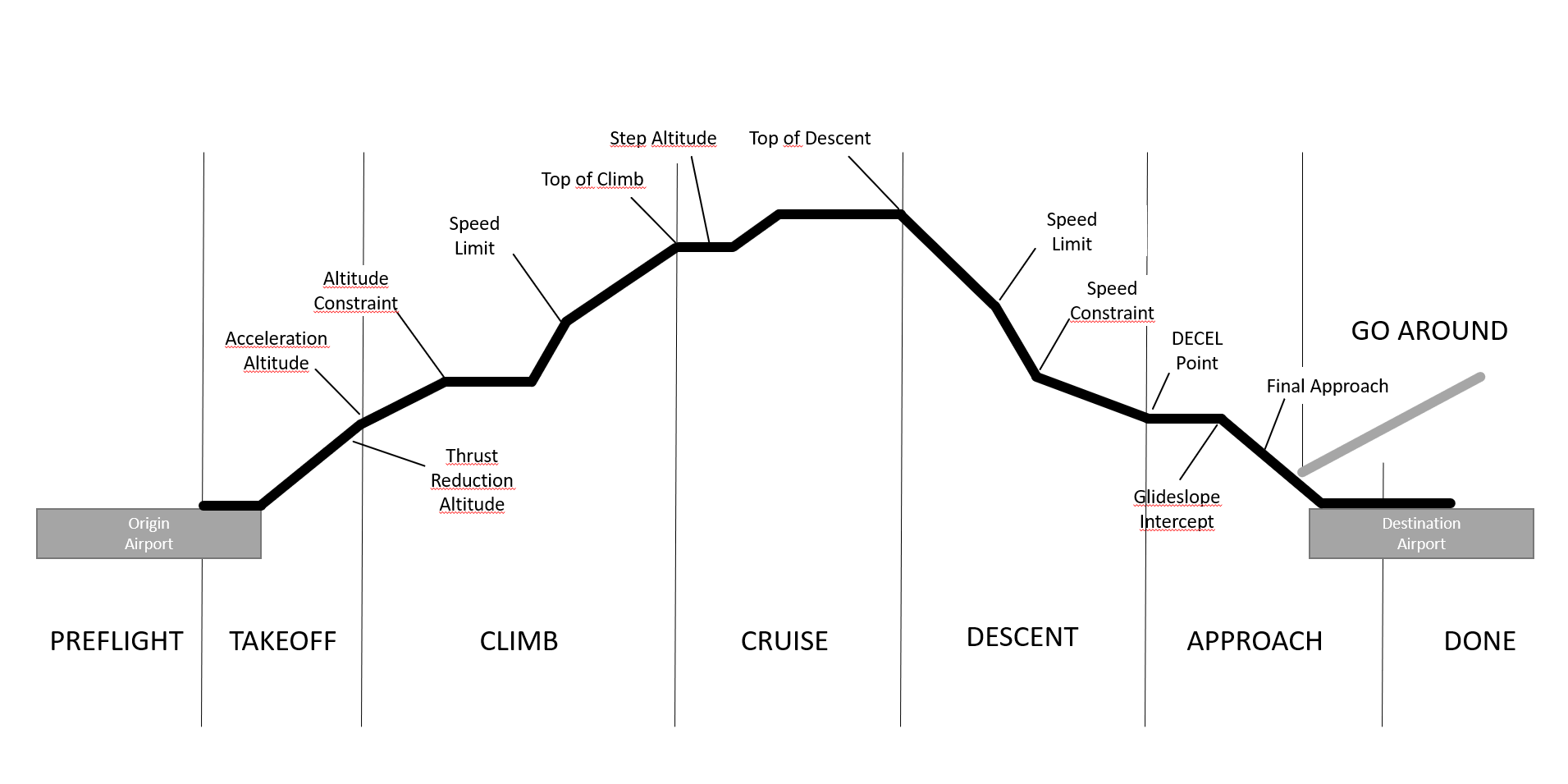
飞行计算机(FMC)中的飞行阶段
在FMC中定义了每个航班都将经历的一组飞行阶段。它们影响航班的飞行计划,也影响水平和垂直引导。
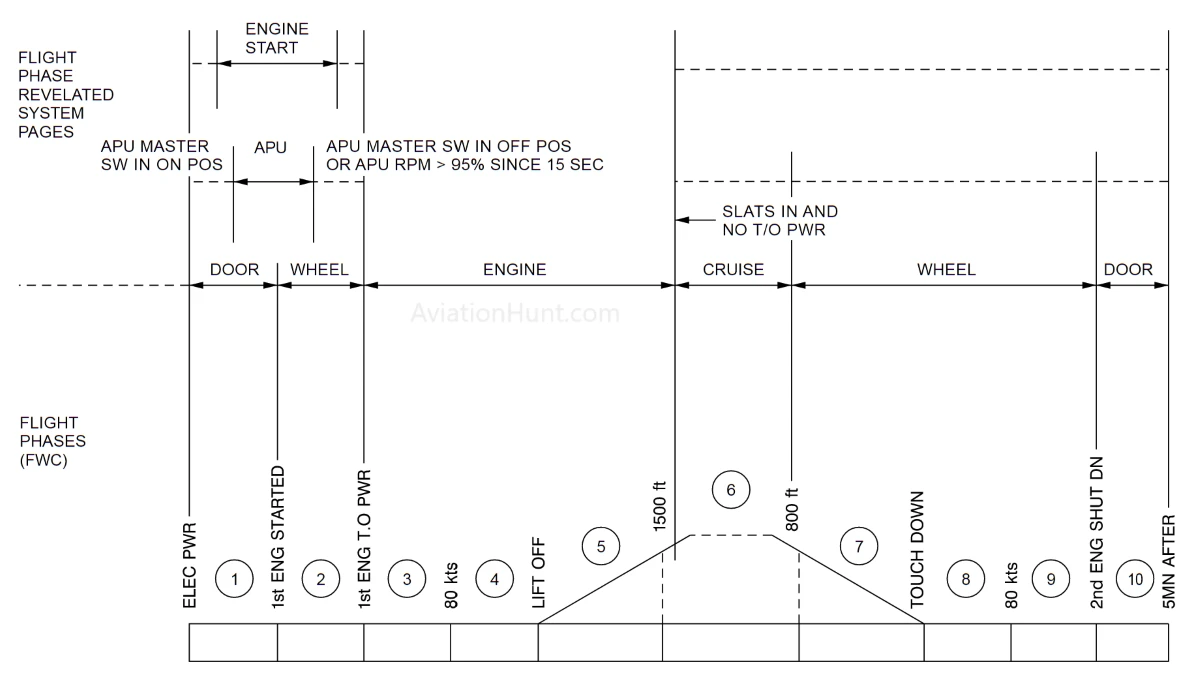
飞行计算机通过综合起落架压缩状态、推力、位置、速度/高度等各种飞行数据判定飞行阶段。 每个阶段的信息会在FMC(波音叫MCDU)的PERF / PROG页面出现。(除了PRF和POF阶段)
PREFLIGHT
在这一阶段,飞行员设置机上的各个系统,进行飞行计划和性能规划 (F-PLN/RTE, INIT) 。 在选择离港/进场程序时,一些航点有高度/速度限制。飞行时,FMC的“管理模式”会遵循这些限制。
TAKEOFF
TAKEOFF 阶段从施加起飞推力(TO/GA 或 FLX)开始,延伸到减推力的高度。
离地后,飞机将保持起飞推力、跑道航向和V2速度爬升,直到到达减推力的高度。
通常,自动驾驶仪可以在离地 200 英尺或起飞后 5 秒(以较晚者为准)接通。
CLIMB / CLB
CLB 阶段从减推力高度延伸到ToC(Top of Climb,爬升顶点)。 通过减推力的高度之后,推力模式切换到CLB;爬升率降低,飞机开始加速;飞机跟随FMC的水平和垂直引导飞行。 从这一阶段开始,可以通过中央控制面板 (MCP / FCU) 给飞行计算机发送指令,也可以让自动驾驶仪的各个通道进入“管理模式”,由FMC管理。
CRUISE / CRZ
CRZ 阶段从ToC延伸到ToD(Top of Descent,下降顶点)。 这一阶段还包括巡航中的爬升和下降。通常,FMC会给出当前性能规划下最优的巡航高度。 随着燃油消耗、飞机重量降低,最优巡航高度会逐渐提高。 因此,可以在FMC中设置阶梯爬升。当到达阶梯爬升点,FMC会暂时进入CLB模式,飞机爬升,直到到达新的巡航高度。 阶梯下降与此同理。
DESCEND / DES
DES 阶段从ToD点开始。选择的目标高度需要低于当前高度。 如果FMC处于“管理模式”或“VNAV”,飞机会在ToD点跟随剖面下降到高度选择器指定的高度。
不要使用“管理模式”或“VNAV”等<跟随飞行计算机计算的下降剖面下降的垂直方式>执行管制员发布的高度指令,除非获得管制员许可,而应考虑使用“开放下降(OPEN DES)”、“高度层改变(FLCH)”或“下降率下降(VS)”等方式执行下降指令。
不同机型在高度改变方式上存在不同的逻辑。请参考相应机型的FCOM。
APPROACH / APPR
当飞行员在 PERF-DES 页面上激活并确认进近(ACTIVATE APPR)时,或者飞机通过进近减速点 (DECEL)时,FMC进入APPR阶段。 APPR阶段延伸到飞机接地。
GO AROUND
当飞机进入 GO AROUND 模式后,FMC指引飞机执行复飞程序。
- DONE !
飞机在地面上停留30秒以上,或所有发动机关闭后,FMC认为本次飞行已经完成。 飞行计划会被清除,为重新初始化做准备。
参考: « Phase of Flight : Definitions and Usage Notes», NTSB , April 2013 1.3 « Airbus A320 TECHNICAL TRAINING MANUAL»